感知机,Perceptron Learning Algorithm (PLA)
感知机是一种简单非常靠谱的分类算法,首先我们看林老师的PPT:
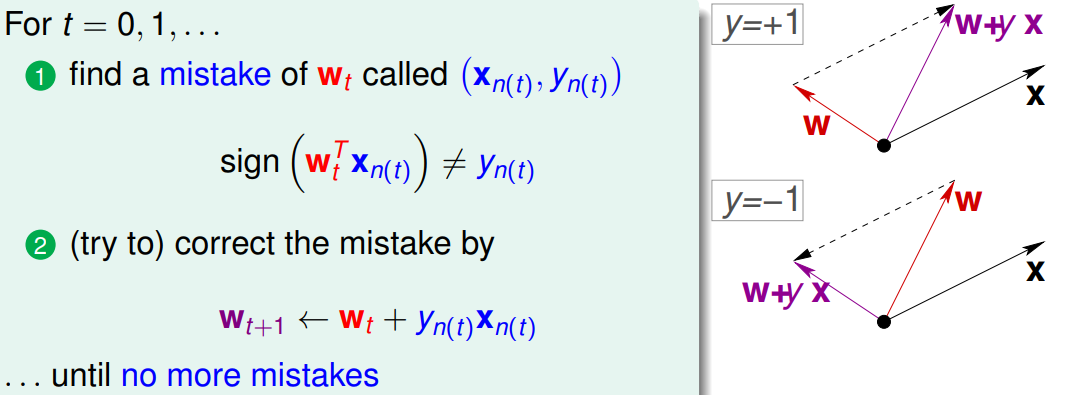
对于$(+1,-1)$的分类,实际上分错分对都是按上述进行更新的。直到没有错误。由向量关系可知,$w$为分类直线的法向量,上图右边表示当$y=+1$时和$y=-1$时,分类直线法向量的更新步骤可以看出:
- 当$y=+1$分类错误时,$w_t^Tx<0,sign(w_{t+1}^Tx)=-1$,两个向量夹角大于90°,更新后向量夹角小于90°,$w_{t+1}^Tx>0,sign(w_{t+1}^Tx)=+1$,此点更新后分类正确
- 当$y=-1$分类错误时,$w_t^Tx>0,sign(w_{t+1}^Tx)=+1$,两个向量夹角小于90°,更新后向量夹角大于90°,$w_{t+1}^Tx<0,sign(w_{t+1}^Tx)=-1$,此点更新后分类正确
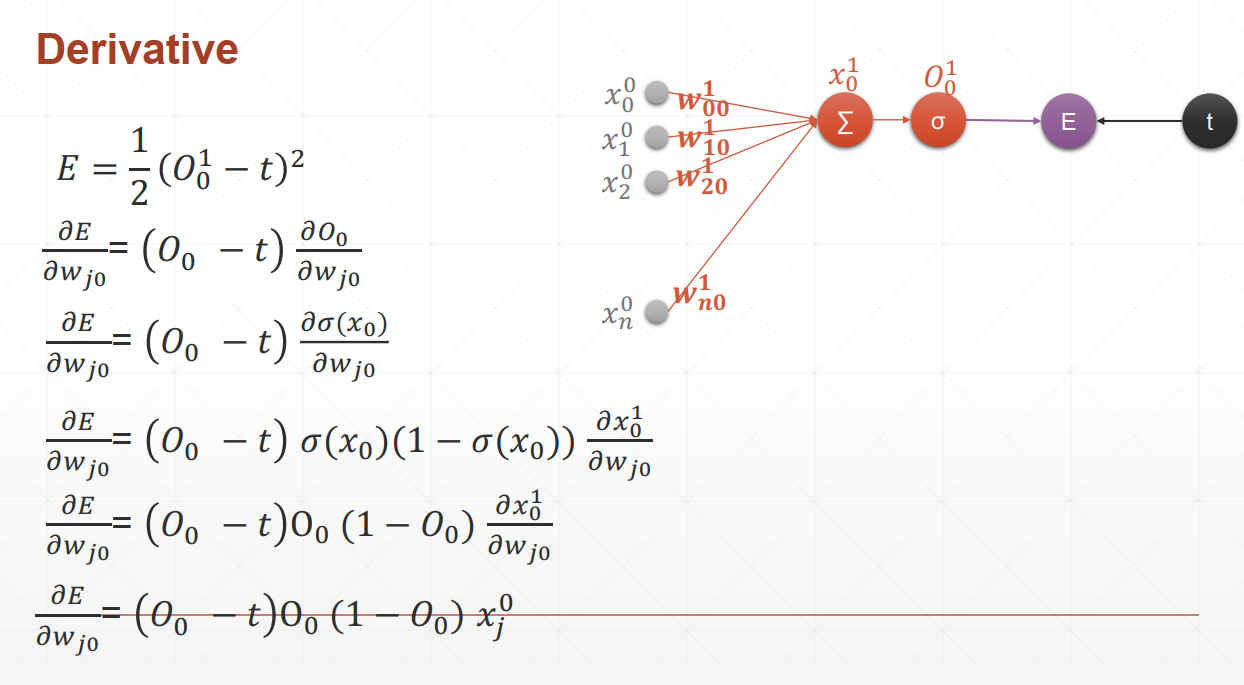
理论证明:
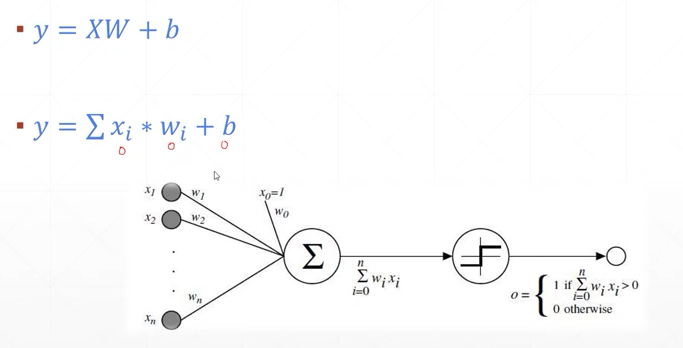
这里感知机模型为:
变形为:
接着给出式
- 因为$y(t)\ne \text {sign}(w^T(t)x(t))$,所以当$\text {sign}(w^T(t)x(t))>0 $时,$y(t)=-1$,
当$\text {sign}(w^T(t)x(t))<0 $时,$y(t)=1$,所以$y(t)w^T(t)x(t) < 0$
- 如果分类正确则,$y(t)w^T(t)x(t) > 0$
注意$x(t)$的第一个分量为$1$,$w(t)$第一个分量为截距$b$,因为$y^2(t)x^T(t)x(t)>0$,因此
- 由上我们知道,即使分类错误,$y(t)w^T(t)x(t) < 0$,但利用更新规则后,$y(t)w^T(t+1)x(t)>y(t)w^T(t)x(t)$,也就是向着正方向前进了,即判断的正确率越来越高,所以如果资料是可分的,那么经过有限步之后可以得到$w$,使得对所有的$x$,$yw^Tx>0$
编程过程中的图示:
由更新规则进行更新,还有就是终止规则:
- 如果已知线性可分,全部判断对终止。
- 若是线性不可分,一般设定循环多少次后终止。




